
About NoCAN
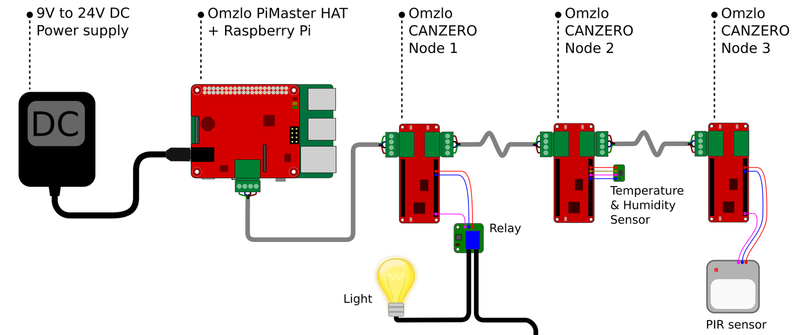
The NoCan IoT platform enables the creation of a very reliable wired network composed of Arduino-compatible nodes connected through CAN bus, targetting application domains where wireless approaches are not satisfactory. Each node features a 32-bit ARM cortex microcontroller (SAMD21G18) and the network is managed by a Raspberry-Pi.
You can control your network with the command line, a smartphone, a browser, MQTT or JSON/REST! And of course, NoCAN is open-hardware so you can incorporate in your own design without any restrictions. Read more about the NoCAN platform or watch our Kickstarter video.
Getting started
You just bought NoCAN hardware and you don't know where to start? Have no fear! We got you covered with our big installation tutorial.
And if you can't figure something out, come and ask for help on our Forums.
Arduino development
Once you have configured your Arduino environment to use the NoCAN board definitions, as described in the Arduino section of our tutorial. You can:
- First, check the Arduino NoCAN library documentation
- Read our PIR sensor tutorial
- Learn how to build an automated plant watering system.
- Look at some sample code for:
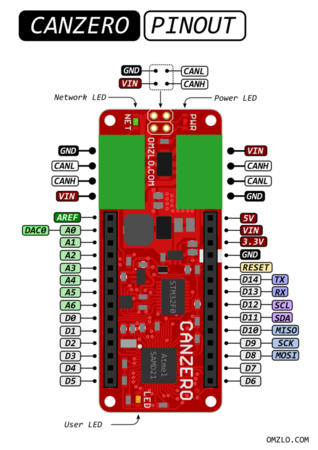
You will also want to check out the pinout diagram of the Omzlo CANZERO.
Interfaces: CLI, Blynk, MQTT, REST, the web, etc.
NoCAN is a strongly interoperable platform that does not rely on any "proprietary cloud" to stay alive. Our command line utility nocanc allows controlling your network from a Linux machine, a Windows PC or a Mac.Learn to:
- Control your NoCAN network from your smartphone with blynk
- Use MQTT to connect NoCAN to IoT platforms such as or
- Control your network with a simple web browser.
- Control your network with a RESTful JSON API (coming soon)
- Make your own interface with the NoCAN event protocol over TCP/IP
- Look at the low level CAN bus protocol
Hardware
Check out the following links for detailed information about our hardware and the firmware that powers it:
- The CANZERO node hardware description, featuring a 32-bit SAMD21, an STM32F0, Arduino-MKR form-factor, ...
- The PiMaster HAT, the HAT that powers your Raspberry-Pi and your network (it also works with the BalenaFin).
- SAMD21 firmware source code for the CANZERO and SMT32F0 CANbus driver firmware source code.
- STM32F0 firmware source code for the PiMaster
- CANZERO Eagle CAD design files and PiMaster Eagle CAD design files
Unless otherwise indicated, all hardware design files are licensed under CC BY-SA 4.0 and all software is licensed under MIT.
Get it now!
You can find the Omzlo CANZERO and the Omzlo PiMaster on our Online store.
Comments
Did you guys look at the CANOpen specification at all? It handles a few of the things that you're attempting to solve...
Alwyn Nixon-Lloyd, about 8 years ago@Alwyn Nixon-Lloyd. Using an existing standard (like CANOpen) is always better than creating a new solution from scratch. However, I don’t think CANOpen offers any form of dynamic address allocation. I don’t believe that it offers firmware update over the network. In general, CANOpen is quite complex and not necessarily the ideal tool for the maker community we are targetting.
Omzlo, about 8 years agoHi,
I just found your project, it seems to be perfect for an experimental project I want to build. But realized you've already closed the funding on Kickstarter...
Is there another way to pitch in and get a Nocan kit?
Thanks Karen
Karen Gabrielyan, about 8 years agoI find this project very fascinating, as I've been doing some research into IoT tech and want to get myself involved into building a small automated garden experiment. I'm looking forward to be able to purchase the kit and get myself into it, unfortunately only found out about it after the kickstarter campaign finished. Coming from 100% software background here, let's hope that hardware doesn't get me too overwhelmed.
Question: Are the any ideas for making a golang library for nocanc, besides the Arduino & cli tool? I'd like to be able to bridge it with https://www.flogo.io/ which looks like it can be a very powerful combination.
Konstantin Indjov, almost 8 years agoThanks for great work with NoCAN. Thanks for publishing this material.
NoCAN looks very easy to use and the fact that is compatible with many Arduino compatible boards make it even more exiting.
Also, thanks for the work with Blynk. Just one word, AWESOME!!
ME, over 7 years ago@ME: thanks for the kind words! It gives us plenty of motivation!
Omzlo, over 7 years agoI like your idea of this protocol its fascinating and really great. Especially considering the ability to remotely upload code to nodes, and having everything connected to a single endpoint. Must the nodes be connected in daisy chain form, or can some sort of hub be created or allowed that allows for all nodes to be connected to a single point? I am a heavy MQTT user, but it seems you don't support certificates authentication over MQTT. If one was to start building products on your protocol, being new what are the chances of not going bursts and lack of support in the future?
Odianosen Ejale, over 7 years ago@Odianosen Ejale, To answer your questions: - For optimal communications, the nodes must be connected in a daisy chain, but other approaches may be possible, see https://www.omzlo.com/faq - We plan to implement enhanced security options for MQTT in the near future, starting with TLS. - Yes, omzlo is a startup and there’s always a risk that we will fail. But the good thing is that we are open-source/open-hardware so anybody can continue our work.
Omzlo, over 7 years ago希望能够很方便的接入homeassistant,这样它将能够与更多的设备进行互动。
allen.shen, almost 7 years agoCANOpen handles dynamic addressing, firmware update over the network, proper master/slave specifications, device profiles, and has been around for roughly 20 years...
Geoffrey Van Landeghem, over 6 years agoI'd be happy to contribute to extending this platform, but development and engagement seems to have stalled. How do we build a community around it ?
David Moorhouse, over 3 years agoHervas Malo M what happens if a girl takes male viagra A quick and detailed physical examination is a must in the initial assessment of myxedema coma
chieree, about 3 years agoHey,
This is precisely what I tried to invent back in 2016 - CANBUS & MQTT - but I didn't have enough electronic knowledge. Now, when I tried to reboot the project I found that somebody did it, and made accessible :D Great job. Are you going to continue development and sell stuff?
brapacz, over 2 years agoHey,
This is precisely what I tried to invent back in 2016 - CANBUS & MQTT - but I didn't have enough electronic knowledge. Now, when I tried to reboot the project I found that somebody did it, and made accessible :D Great job. Are you going to continue development and sell stuff?
brapacz, over 2 years agoHey,
This is precisely what I tried to invent back in 2016 - CANBUS & MQTT - but I didn't have enough electronic knowledge. Now, when I tried to reboot the project I found that somebody did it, and made accessible :D Great job. Are you going to continue development and sell stuff?
brapacz, over 2 years agoHey there
In today's fast-paced business world, staying ahead often means delegating tasks efficiently. That's where 5C VA steps in – your partner for exceptional, expert, and seasoned virtual support across any industry. At an unbeatable rate of just $9.00 per hour, our virtual assistants will optimize your operational workflow, empowering you to focus on core business strategies while we handle the rest.
From handling your emails, customer support, call answering, and scheduling, to handling complex data management tasks, our team is ready to support your business needs with precision and professionalism. Picture the growth potential when your time is spent on what truly matters, powered by the support of a dedicated virtual assistant who gets your business inside out.
Let 5C Virtual Support be the key to unleashing your business's full potential. Reach out to us today to find out how our tailored solutions can elevate your productivity and efficiency.
Best regards
Tommy Tanner 5C Virtual Assistance sales@5cvas.com 904-685-6366 www.5cvas.com/?refid=243
Tommy Tanner, about 2 years agoСамые актуальные новинки мировых подиумов. Абсолютно все новости лучших подуимов. Модные дома, торговые марки, высокая мода. Новое место для стильныех хайпбистов. https://richlifestyle.ru/
CharlesMoK, about 2 years agoТочно актуальные новинки модного мира. Актуальные новости самых влиятельных подуимов. Модные дома, бренды, высокая мода. Интересное место для модных хайпбистов. https://stylecross.ru/
Zofiadib, about 2 years agoСамые трендовые новости индустрии. Все новости лучших подуимов. Модные дома, торговые марки, haute couture. Лучшее место для трендовых людей. https://hypebeasts.ru/
Donaldvor, about 2 years agoHey there
We provide real human traffic with a revenue share option.
Are you striving for long-term growth and looking forward to elevate your ad revenue? Pristine Traffic offers premium traffic solutions that bring engaged, high-quality users to your site hassle-free. Our traffic helps you: - Enhance user engagement and retention - Maximize your ad earnings - Ensure consistent, profitable traffic flow
Be among the successful websites that have achieved sustainable growth with our tailored solutions. Seize the opportunity to elevate your ad revenue and secure long-term success.
Learn more about Pristine Traffic and get started today: https://bit.ly/prstraffic
Regards
Abigail Murphy Pristine Traffic abigail@pristinetraffic.com WhatsApp: +18143008897 https://bit.ly/prstraffic
Agueda Begum, about 2 years agoJust like as you got this message, we can submit your message to millions of contact forms.
We guarantee your message arrives in the inbox by targeting contact forms directly.
Start reaching 100M websites and see your leads, sales, and recognition grow. All starting at just $22! Let us help you taking your brand to the next level today.
’’’’ Learn more: https://bit.ly/cformleads
In case you no longer want to receive additional correspondence from this email, please use this link: https://bit.ly/removemysites 3794 90th Avenue, Hanna, NY, USA, T0j 1p0
Hubert Brothers, over 1 year agoНа нашем сайте вы найдете качественные витамины для мозга. Эти витамины способствуют стимуляции работы мозга. https://river9gk3f.frewwebs.com/32697994/Получение-my-витамины-для-мозга-Работать
StevenGagma, over 1 year agoНа данном сайте вы сможете узнать полезную информацию о полезных веществах для улучшения работы мозга. Также здесь представлены советы экспертов по приёму эффективных добавок и их влиянию на когнитивных функций. https://rylan2tx1e.snack-blog.com/32074193/5-простых-фактов-о-витамины-для-мозга-Описываемые
Ronalddub, over 1 year agoНа данном сайте вы сможете узнать полезную информацию о витаминах для улучшения работы мозга. Кроме того, вы найдёте здесь рекомендации специалистов по приёму эффективных добавок и способах улучшения когнитивных функций. https://rowan2ho4o.like-blogs.com/31969372/Основными-принципами-витамины-для-мозга
Scottvek, over 1 year agoНа этом сайте вы найдёте подробную информацию о препарате Ципралекс. Вы узнаете здесь сведения о основных показаниях, режиме приёма и вероятных побочных эффектах. http://SupatraHuahinResortCompanyLimitedThailand.omob.xyz/category/website/wgI2vZFhZf5rbhFqBTP7G0CD1
Bennyemume, over 1 year agoНа этом сайте вы сможете найти полезную информацию о препарате Ципралекс. Вы узнаете здесь информация о показаниях, дозировке и возможных побочных эффектах. http://AinLallaZinehMorocco.auio.xyz/category/website/wgI2vZFhZf5rbhFqBTP7G0CD1
Bennyemume, over 1 year agoНа данном сайте вы найдёте полезную информацию о лекарственном средстве Ципралекс. Вы узнаете здесь сведения о основных показаниях, дозировке и вероятных побочных эффектах. http://NahreShurAbIran.auio.xyz/category/website/wgI2vZFhZf5rbhFqBTP7G0CD1
Bennyemume, over 1 year agoНа данном сайте вы сможете найти полезную информацию о препарате Ципралекс. Здесь представлены информация о основных показаниях, дозировке и вероятных побочных эффектах. http://Remington.eorg.site/category/website/wgI2vZFhZf5rbhFqBTP7G0CD1
Bennyemume, over 1 year agoUnderstand I spat out of your Dudaev He ll
Ahri Milless, over 1 year agoUnderstand I spat out of your Dudaev He ll
Ahri Milless, over 1 year agoНа данном сайте вы можете приобрести виртуальные мобильные номера различных операторов. Они могут использоваться для подтверждения профилей в различных сервисах и приложениях. В ассортименте представлены как постоянные, так и одноразовые номера, которые можно использовать чтобы принять SMS. Это удобное решение если вам не желает использовать основной номер в сети. https://www.06452.com.ua/list/491566 Оформление заказа очень простой: выбираете необходимый номер, оплачиваете, и он становится готов к использованию. Оцените услугу прямо сейчас!
RobertChuts, over 1 year agoНа этом сайте собрана важная информация о лечении депрессии, в том числе у возрастных пациентов. Здесь можно найти методы диагностики и советы по восстановлению. http://brynmawrsinus.com/media/js/netsoltrademark.php?d=empathycenter.ru%2Farticles%2Folanzapin-i-bar%2F Отдельный раздел уделяется возрастным изменениям и их связи с психическим здоровьем. Также рассматриваются современные медикаментозные и психологические методы поддержки. Материалы помогут лучше понять, как правильно подходить к угнетенным состоянием в пожилом возрасте.
Danielskync, over 1 year agoЦентр ментального здоровья — это место, где любой может найти поддержку и квалифицированную консультацию. Специалисты помогают разными запросами, включая стресс, усталость и депрессивные состояния. https://benellim3forsale93715.get-blogging.com/33485800/5-simple-statements-about-marketing-explained В центре используются эффективные методы лечения, направленные на улучшение внутренней гармонии. Здесь организована комфортная атмосфера для открытого общения. Цель центра — помочь каждого клиента на пути к психологическому здоровью.
FrankCon, over 1 year agoЦентр ментального здоровья — это пространство, где каждый может найти поддержку и квалифицированную консультацию. Специалисты работают с различными проблемами, включая повышенную тревожность, эмоциональное выгорание и депрессивные состояния. http://eldisplay.com/media/js/netsoltrademark.php?d=empathycenter.ru%2Farticles%2Fantipsikhotiki-dlitelnogo-deystviya%2F В центре используются эффективные методы терапии, направленные на улучшение эмоционального баланса. Здесь создана безопасная атмосфера для открытого общения. Цель центра — помочь каждого клиента на пути к психологическому здоровью.
FrankCon, over 1 year agoЗдесь можно найти способы диагностики и подходы по улучшению состояния. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21
Davidowece, over 1 year agoОтдельный раздел уделяется психологическим особенностям и их связи с психическим здоровьем. Также рассматриваются эффективные терапевтические и немедикаментозные методы лечения. Материалы помогут разобраться, как правильно подходить к депрессией в пожилом возрасте.
Центр ментального здоровья — это пространство, где каждый может получить помощь и профессиональную консультацию. Специалисты помогают разными запросами, включая повышенную тревожность, эмоциональное выгорание и психологический дискомфорт. http://amberskywan.com/media/js/netsoltrademark.php?d=empathycenter.ru%2Farticles%2Fstabilizatory-nastroeniya%2F В центре используются современные методы терапии, направленные на улучшение эмоционального баланса. Здесь создана комфортная атмосфера для доверительного диалога. Цель центра — помочь каждого клиента на пути к душевному равновесию.
FrankCon, over 1 year agoНа данном сайте вы найдете полезные сведения о психическом здоровье и его поддержке. Мы рассказываем о методах укрепления эмоционального благополучия и снижения тревожности. Экспертные материалы и рекомендации специалистов помогут понять, как поддерживать психологическую стабильность. Важные темы раскрыты доступным языком, чтобы любой мог найти важную информацию. Позаботьтесь о своем душевном здоровье уже прямо сейчас! http://edu-prize.org/media/js/netsoltrademark.php?d=empathycenter.ru%2Fpreparations%2Fl%2Flitiy%2F
Larrysib, over 1 year agoКлиника премиум-класса обеспечивает профессиональную медицинскую помощь всем пациентам. Мы гарантируем индивидуальный подход всестороннюю диагностику. В клинике работают опытные и внимательные врачи, применяющие новейшие технологии. Мы предлагаем широкий спектр медицинских процедур, среди которых диагностические исследования. Забота о вашем здоровье — важнейшая задача нашего коллектива. Свяжитесь с нами, и получите квалифицированную помощь. evergreen-friends.com
Benitoamaps, over 1 year agoСовременная клиника предлагает широкий спектр медицинских услуг для каждого пациента. Команда профессионалов имеют многолетний опыт и применяют передовые методики. У нас есть безопасная и уютная атмосфера для восстановления здоровья. Клиника предоставляет индивидуальный подход для всех обратившихся. Приоритетом для нас является поддержанию высокого уровня сервиса. Наши пациенты могут рассчитывать на оперативную помощь без очередей и лишнего стресса. wiki.addmeintop10.com
JasonZef, over 1 year agoВидеонаблюдение в офисе обеспечивают сохранять порядок и защиту на территории офиса. С помощью подобных систем, руководители могут следить ситуацию в офисе онлайн. Система видеонаблюдения в офисе обеспечивает минимизировать конфликты и ограничивать доступ в помещения. Инновационные решения видеонаблюдения в офисе обладают записью в облако и доступом с телефона. Системы видеонаблюдения в офисе широко применяется в крупных компаниях, создавая спокойствие и порядок.
Видеонаблюдение для банковsag, over 1 year agoThe site provides many types of pharmaceuticals for easy access. Anyone can securely access treatments with just a few clicks. Our inventory includes standard drugs and targeted therapies. The full range is acquired via verified distributors. https://pando.life/article/1028707 We maintain user protection, with data protection and prompt delivery. Whether you're managing a chronic condition, you'll find safe products here. Begin shopping today and get reliable healthcare delivery.
MichealJibre, over 1 year agoTime to supercharge your outreach—instantly! Snag our Massive USA B2B Database—over 12 million decision-maker records split into almost 8,000 niche-sorted Excel files—for just $99 (normally $500). Updated April 2025, you’ll find direct emails, phone numbers, staff size, and company sales numbers, condensed into a lean compact 20GB download.
This is temporary—regular price is $500. Lifetime updates are included and start converting leads by tomorrow with enterprise-grade data for pennies.
Buy now for $99: https://bit.ly/allusb2b
Stella Norton, about 1 year agoOur casino is unbeatable! Dive into GoPlay's virtual casino realm and explore an unrivaled selection of slots, table games, and live dealer action—all tailored for cryptocurrency play. Featuring attractive welcome offers and promotional drops around every corner, your chance to win has never been higher.
Make sure you don’t miss the chance to boost your bankroll with quick, safe crypto transactions and 24/7 support.
Join the fun today—head to https://goplay.se
Connect with our community on Facebook at https://www.facebook.com/goplay.se, and stay in the loop on Instagram at https://www.instagram.com/goplay.se now!
Naomi Morris, about 1 year agohttps://cz-marketing-160.sgp1.digitaloceanspaces.com/research/je-tall-sf-marketing-(39).html However, to determine whether or not or not you also wants to coordinate with each moms, verify in with the bride.
Jennifer, about 1 year agohttps://cz-marketing-160.sgp1.digitaloceanspaces.com/research/je-tall-sf-marketing-(39).html However, to determine whether or not or not you also wants to coordinate with each moms, verify in with the bride.
Jennifer, about 1 year agohttps://cz-marketing-160.sgp1.digitaloceanspaces.com/research/je-tall-sf-marketing-(39).html However, to determine whether or not or not you also wants to coordinate with each moms, verify in with the bride.
Jennifer, about 1 year agohttps://cz-marketing-160.sgp1.digitaloceanspaces.com/research/je-tall-sf-marketing-(39).html However, to determine whether or not or not you also wants to coordinate with each moms, verify in with the bride.
Jennifer, about 1 year agoWithin this platform, explore a wide range of online casinos. Searching for classic games or modern slots, there’s a choice for any taste. Every casino included checked thoroughly for safety, enabling gamers to bet with confidence. gambling Moreover, the site offers exclusive bonuses and deals to welcome beginners as well as regulars. With easy navigation, discovering a suitable site is quick and effortless, enhancing your experience. Keep informed regarding new entries through regular check-ins, since new casinos appear consistently.
free spins, about 1 year agoНа нашей платформе взрослый контент. Контент подходит для совершеннолетних. У нас собраны множество категорий. Платформа предлагает лучшие материалы в сети. зрелые женщины порно онлайн Вход разрешен исключительно 18+. Наслаждайтесь возможностью выбрать именно своё.
порно фистинг онлайн, about 1 year agohttps://rococo-genie-f91e05.netlify.app/
Generally I do not learn article on blogs, however I would like to say that this write-up very pressured me to try and do so! Your writing taste has been amazed me. Thank you, quite great article.
Orval, about 1 year agohttps://rococo-genie-f91e05.netlify.app/
Generally I do not learn article on blogs, however I would like to say that this write-up very pressured me to try and do so! Your writing taste has been amazed me. Thank you, quite great article.
Orval, about 1 year agohttps://rococo-genie-f91e05.netlify.app/
Generally I do not learn article on blogs, however I would like to say that this write-up very pressured me to try and do so! Your writing taste has been amazed me. Thank you, quite great article.
Orval, about 1 year agohttps://rococo-genie-f91e05.netlify.app/
Generally I do not learn article on blogs, however I would like to say that this write-up very pressured me to try and do so! Your writing taste has been amazed me. Thank you, quite great article.
Orval, about 1 year agohttps://digi433sa.z6.web.core.windows.net/research/digi433sa-(260).html Our top-rated sizes range from 00 – 32 to additionally embrace petite merchandise.
Gilberto, about 1 year agohttps://digi433sa.z6.web.core.windows.net/research/digi433sa-(260).html Our top-rated sizes range from 00 – 32 to additionally embrace petite merchandise.
Gilberto, about 1 year agohttps://digi433sa.z6.web.core.windows.net/research/digi433sa-(260).html Our top-rated sizes range from 00 – 32 to additionally embrace petite merchandise.
Gilberto, about 1 year agohttps://digi433sa.z6.web.core.windows.net/research/digi433sa-(260).html Our top-rated sizes range from 00 – 32 to additionally embrace petite merchandise.
Gilberto, about 1 year agoWe send your offer to thousands of business platforms via their online forms. You don’t need your own list ... we supply all the data.
Just like you received this message.
Looking for more customers, sales prospects, business leads?
It’s simple: you give us your message, and we blast it to key decision-makers. No ads, no inbox clutter, no tech skills needed.
An effective, budget-friendly way to put your offer in front of huge audiences ... with plans from $22.
Start now at our site: https://bit.ly/formmarket
Eleanor Carroll, about 1 year agoНаш сервис способен найти данные о любом человеке . Достаточно ввести никнейм в соцсетях, чтобы сформировать отчёт. Система анализирует открытые источники и цифровые следы. глаз бога поиск людей Информация обновляется в реальном времени с проверкой достоверности . Идеально подходит для анализа профилей перед сотрудничеством . Конфиденциальность и точность данных — наш приоритет .
BarryDek, about 1 year agohttps://digi616sa.netlify.app/research/digi616sa-(139) Look for cinched-in jackets that received't solely disguise her wobbly bits, but in addition assist her change her look from day to nighttime.
Hans, 12 months agohttps://digi616sa.netlify.app/research/digi616sa-(139) Look for cinched-in jackets that received't solely disguise her wobbly bits, but in addition assist her change her look from day to nighttime.
Hans, 12 months agohttps://digi616sa.netlify.app/research/digi616sa-(139) Look for cinched-in jackets that received't solely disguise her wobbly bits, but in addition assist her change her look from day to nighttime.
Hans, 12 months agohttps://digi616sa.netlify.app/research/digi616sa-(139) Look for cinched-in jackets that received't solely disguise her wobbly bits, but in addition assist her change her look from day to nighttime.
Hans, 12 months agohttps://digi16sa.sfo3.digitaloceanspaces.com/research/digi16sa-(181).html The contrast between these two robes is in how they're selected.
Dedra, 12 months agohttps://digi16sa.sfo3.digitaloceanspaces.com/research/digi16sa-(181).html The contrast between these two robes is in how they're selected.
Dedra, 12 months agohttps://digi16sa.sfo3.digitaloceanspaces.com/research/digi16sa-(181).html The contrast between these two robes is in how they're selected.
Dedra, 12 months agohttps://digi16sa.sfo3.digitaloceanspaces.com/research/digi16sa-(181).html The contrast between these two robes is in how they're selected.
Dedra, 12 months agohttps://digi642sa.netlify.app/research/digi642sa-(136) Jovani Plus measurement mom of the bride clothes suits any body type.
Toby, 12 months agohttps://digi642sa.netlify.app/research/digi642sa-(136) Jovani Plus measurement mom of the bride clothes suits any body type.
Toby, 12 months agohttps://digi642sa.netlify.app/research/digi642sa-(136) Jovani Plus measurement mom of the bride clothes suits any body type.
Toby, 12 months agohttps://digi642sa.netlify.app/research/digi642sa-(136) Jovani Plus measurement mom of the bride clothes suits any body type.
Toby, 12 months agohttps://digi637sa.netlify.app/research/digi637sa-(429) Our top-rated sizes range from 00 – 32 to additionally embody petite products.
Marietta, 12 months agohttps://digi637sa.netlify.app/research/digi637sa-(429) Our top-rated sizes range from 00 – 32 to additionally embody petite products.
Marietta, 12 months agohttps://digi637sa.netlify.app/research/digi637sa-(429) Our top-rated sizes range from 00 – 32 to additionally embody petite products.
Marietta, 12 months agohttps://digi637sa.netlify.app/research/digi637sa-(429) Our top-rated sizes range from 00 – 32 to additionally embody petite products.
Marietta, 12 months agohttps://je-tall-marketing-765.blr1.digitaloceanspaces.com/research/je-marketing-(99).html Impressive beading and an alluring neckline make this fashion worthy of even the fanciest of black-tie weddings.
Margarita, 12 months agohttps://je-tall-marketing-765.blr1.digitaloceanspaces.com/research/je-marketing-(99).html Impressive beading and an alluring neckline make this fashion worthy of even the fanciest of black-tie weddings.
Margarita, 12 months agohttps://je-tall-marketing-765.blr1.digitaloceanspaces.com/research/je-marketing-(99).html Impressive beading and an alluring neckline make this fashion worthy of even the fanciest of black-tie weddings.
Margarita, 12 months agohttps://je-tall-marketing-765.blr1.digitaloceanspaces.com/research/je-marketing-(99).html Impressive beading and an alluring neckline make this fashion worthy of even the fanciest of black-tie weddings.
Margarita, 12 months agoПоиск консультанта — ответственный процесс на пути к укреплению душевного здоровья. Для начала стоит уточнить свои цели и запросы от работы с экспертом. Важно оценить образование и стаж специалиста. Комментарии других пациентов могут помочь сделать выбор более обоснованным. https://manuelriwj32087.mywikiparty.com/1725861/%D0%94%D0%B5%D1%82%D1%81%D0%BA%D0%B8%D0%B9%D0%BF%D1%81%D0%B8%D1%85%D0%BE%D1%82%D0%B5%D1%80%D0%B0%D0%BF%D0%B5%D0%B2%D1%82%D0%B2%D0%9C%D0%BE%D1%81%D0%BA%D0%B2%D0%B5%D0%A6%D0%B5%D0%BD%D1%82%D1%80%D0%BF%D1%81%D0%B8%D1%85%D0%B8%D1%87%D0%B5%D1%81%D0%BA%D0%BE%D0%B3%D0%BE%D0%B7%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D1%8F_%D0%AD%D0%BC%D0%BF%D0%B0%D1%82%D0%B8%D1%8F Также следует учитывать методы, которыми оперирует специалист. Стартовая сессия помогает оценить, насколько подходит стиль общения. Необходимо осознавать тариф и режим работы (например, онлайн). Взвешенный выбор специалиста способен ускорить движение к целям.
ErnieImpow, 10 months agohttps://je-tal-marketing-952.lon1.digitaloceanspaces.com/research/je-marketing-(470).html Sweet and sophisticated, this robe wows with its bold tone and classic silhouette.
Francisca, 7 months agohttps://je-tal-marketing-952.lon1.digitaloceanspaces.com/research/je-marketing-(470).html Sweet and sophisticated, this robe wows with its bold tone and classic silhouette.
Francisca, 7 months agohttps://je-tal-marketing-952.lon1.digitaloceanspaces.com/research/je-marketing-(470).html Sweet and sophisticated, this robe wows with its bold tone and classic silhouette.
Francisca, 7 months agohttps://je-tal-marketing-952.lon1.digitaloceanspaces.com/research/je-marketing-(470).html Sweet and sophisticated, this robe wows with its bold tone and classic silhouette.
Francisca, 7 months agoСайты для взрослых существуют как отдельные платформы с строгими ограничениями. Их основная цель — обеспечить просмотр к материалам, адресованному только взрослой аудитории. Эти веб-сайты дают возможность авторам размещать работы, не предназначенные для детей. Они играют и просветительскую роль в области интимного здоровья. Владельцы таких проектов должны соблюдать законодательные нормы о распространении подобного контента. Помимо прочего, данные платформы нередко используют специальные меры верификации пользователей. Следовательно, наличие таких ресурсов — это реакция на естественный интерес определённой аудитории. vpn
сочные девушки, 4 months ago211 comments triggered our SPAM filter and will be reviewed before publication.
Leave a comment